Advanced technologies designed to solve complex challenges
When the first Bin Picking solutions were introduced, the industry faced a typical mathematical and physical challenge related to robotics and machine vision. This limitation was only overcome through the introduction of 3D vision systems combined with anthropomorphic robots.
Initially, 3D vision relied on relatively basic laser scanning systems, where the vision unit moved along a linear axis to reconstruct the acquired data. Over the last 15 years, thanks to technological progress, what was once considered a complex mathematical problem has evolved into an accessible and fully operational industrial technology. Over the last 15 years, thanks to technological progress, what was once considered a complex mathematical problem has evolved into an accessible and fully operational industrial technology.
Bin Picking technology was developed to solve several key challenges faced by our customers:
Palletizing machined parts
Reducing operator physical effort during CNC machine loading/unloading
Reducing handling and manipulation times
Three key factors that have driven the evolution of this technology
3D SENSORS
The introduction of 3D sensors has made it possible, without moving the parts, to capture a very precise 3D image of the acquired volume. This technology allows improved performance both in terms of the speedof the operation itself and with regard to grip.
Computing Speed
Increased processing power of onboard industrial computers enables the system to calculate and predict all robot trajectories and movements in real time.
SOFTWARE EVOLUTION
The significant evolution of software over the last few years has further improved the reliability, flexibility and efficiency of Bin Picking applications.
What is Bin Picking?
Over the last fifteen years, the industrial automation and CNC machine tending sector has experienced a major technological evolution: Bin Picking.
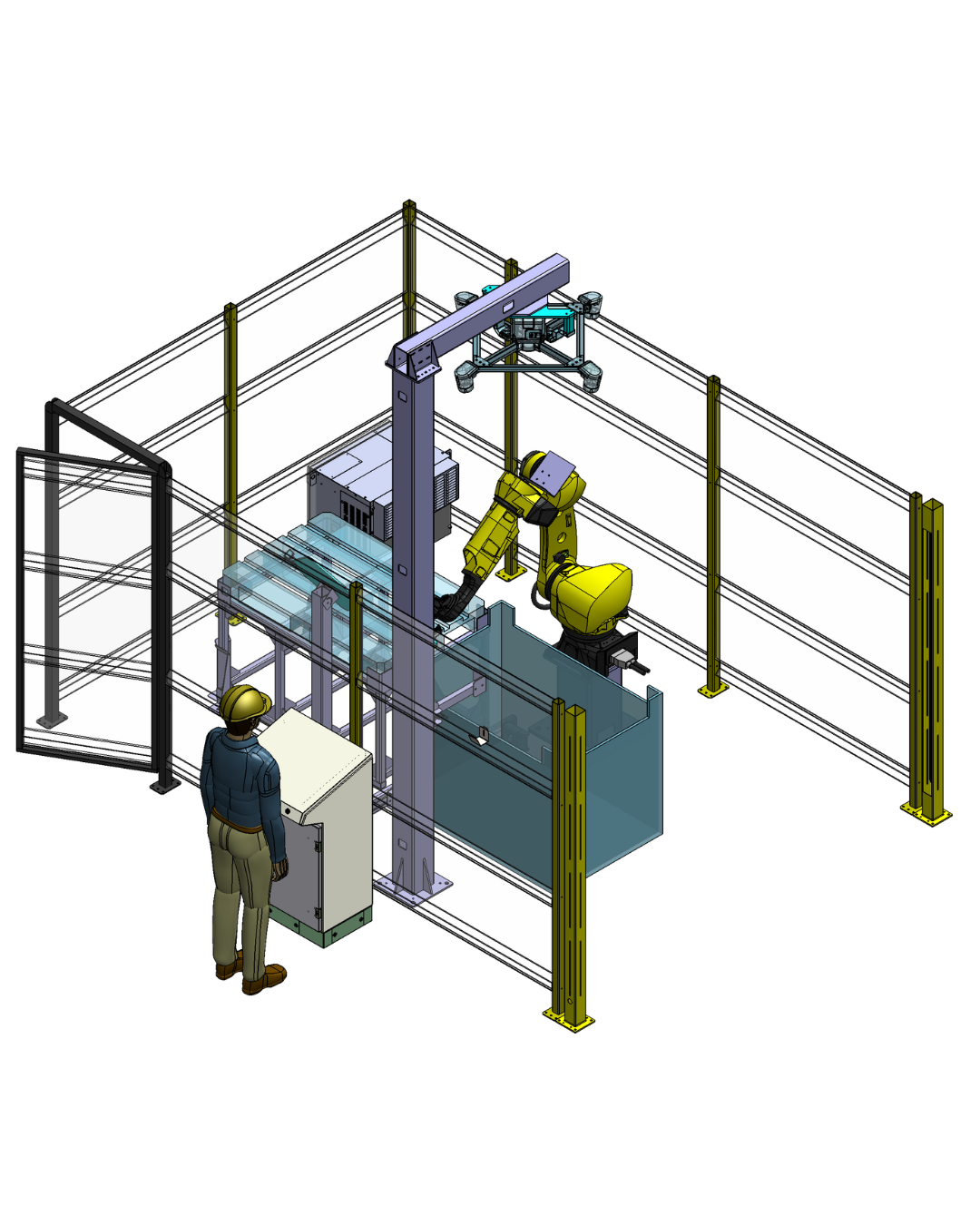
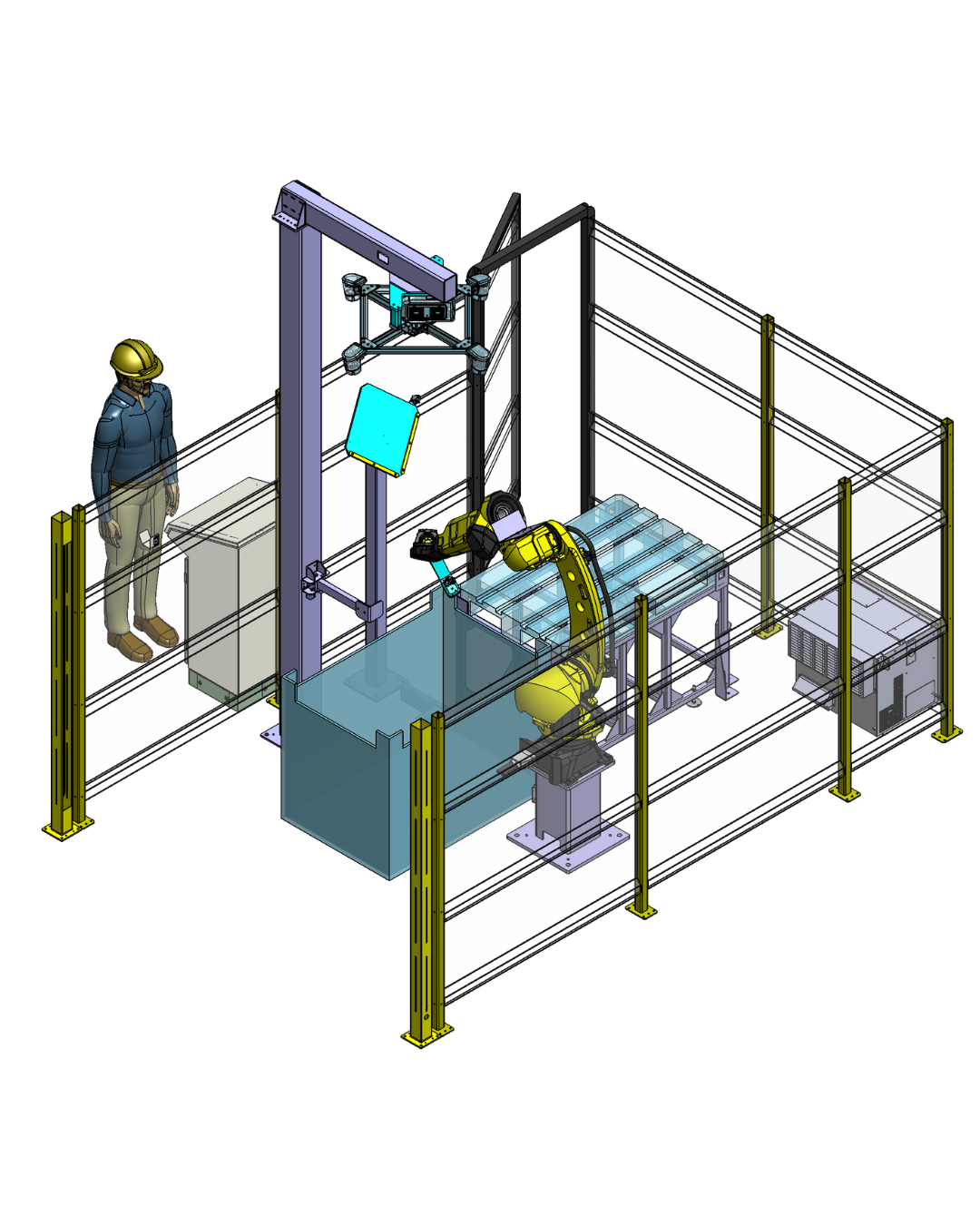
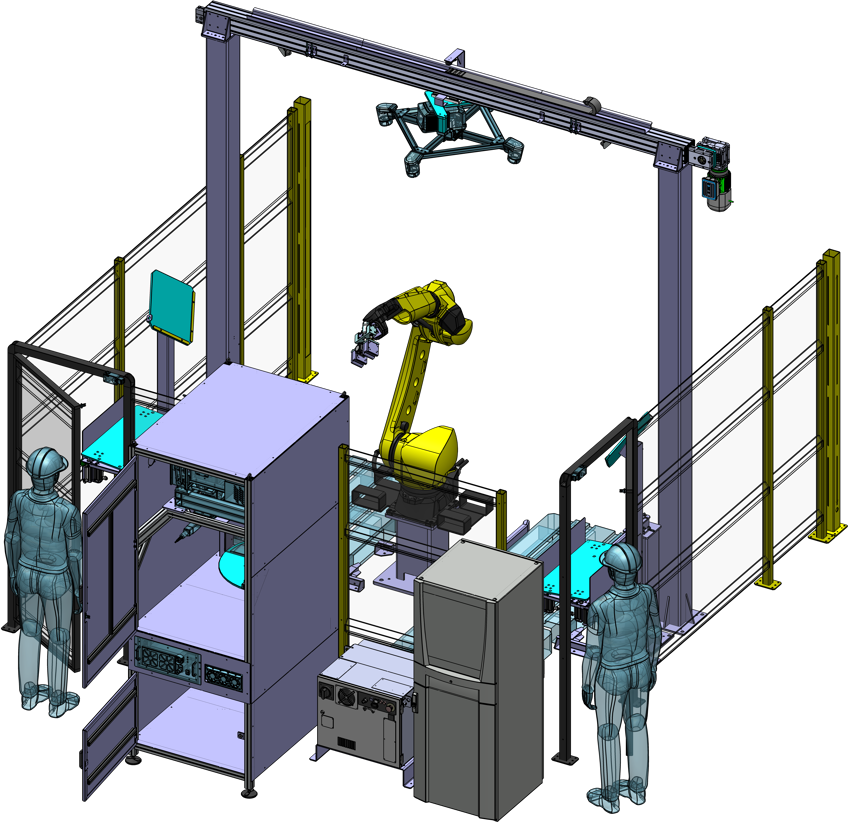
Bin Picking is an automated system designed to randomly pick parts from a bin or container and transfer them to a storage station, a customer-defined location or directly into subsequent machining processes.
ADVANTAGES
More precise palletizing operations
Reduced working and handling times
Lower labor costs
Continuous and uninterrupted operation (lights-out manufacturing)
High robot precision during entry and exit from the bin, thanks to software capable of calculating optimized robot paths
Ability to manage multiple bins containing randomly positioned parts — even different part types — using a single 3D vision system
Automatic switching to the next bin once the previous one has been emptied, without operator intervention
Beam sensors capable of detecting different types of containers (wood, plastic, steel, etc.)
Multiple applications for the picked parts:
palletizing, machining process feeding and handling operations
Compact cell dimensions
Safety light curtains capable of stopping the production cycle whenever human presence is detected
The complexity of this technology can be explained by the ratio of the size of the object to be picked to the crate containing it.
When a very large object to be picked from a small crate, we speak of a simple application. When, on the other hand, a small object is to be picked from a very large crate, we speak of a more complex application, as a higher degree of repeatability and accuracy is required.
OUR APPROACH
Based on the type of product and customer requirements, a preliminary feasibility check is carried out. This initial analysis enables us to provide the customer with a series of data that are indispensable for formulating the choice: feasibility outcome, cycle times, bin emptying rate, type of robot and gripper systems, cell layout and many other useful data. In addition to a simulation aimed at the required specifications, it enables the operator to see a working application at any time.
TESTIMONIAL
“We expected a solution capable of meeting our targets in terms of timing and precision, but ROBO FEED went even further: they improved cycle time by 20% and achieved a bin emptying percentage exceeding 99%. All of this through an interface that is simple to use even for non-expert operators. It is rare to find a supplier so aligned with the customer’s objectives and with such a genuine ability to listen.”
G.S. – CEO
See a live
operational case study
In the case history developed for HT Srl, ROBO FEED designed and implemented an advanced Bin Picking solution for the automated picking of loose raw blades intended for the agricultural machinery sector.
The application was engineered to manage a highly complex process involving thousands of randomly positioned parts inside large containers, ensuring high precision, operational speed and continuous production flow.
Achieved Objectives
Complete automation of the loose-part picking process
Bin emptying efficiency up to 99%
Cycle time below 12 seconds
Reduction of manual operations and operator dependency
Increased production continuity and process stability