
VANTAGGI
- Pallettizzazione più precisa
- Tempi di lavoro ridotti
- Riduzione dei costi della manodopera
- Funzionamento costante e continuo senza interruzioni (ciclo non presidiato)
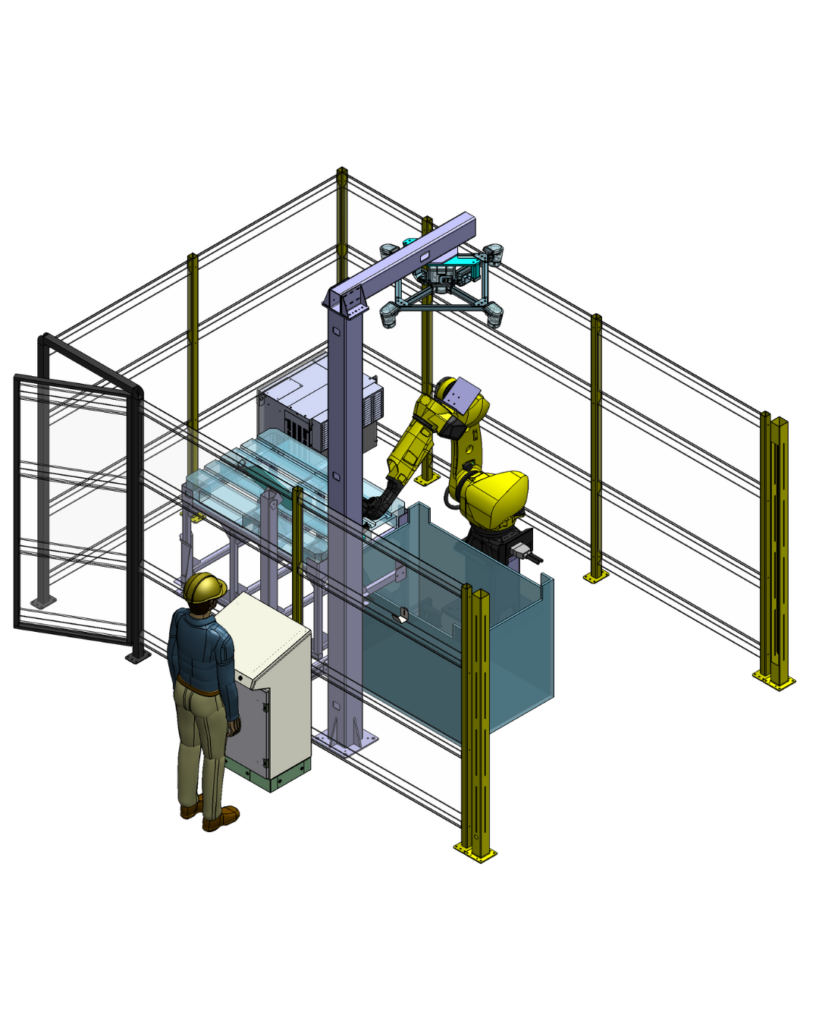
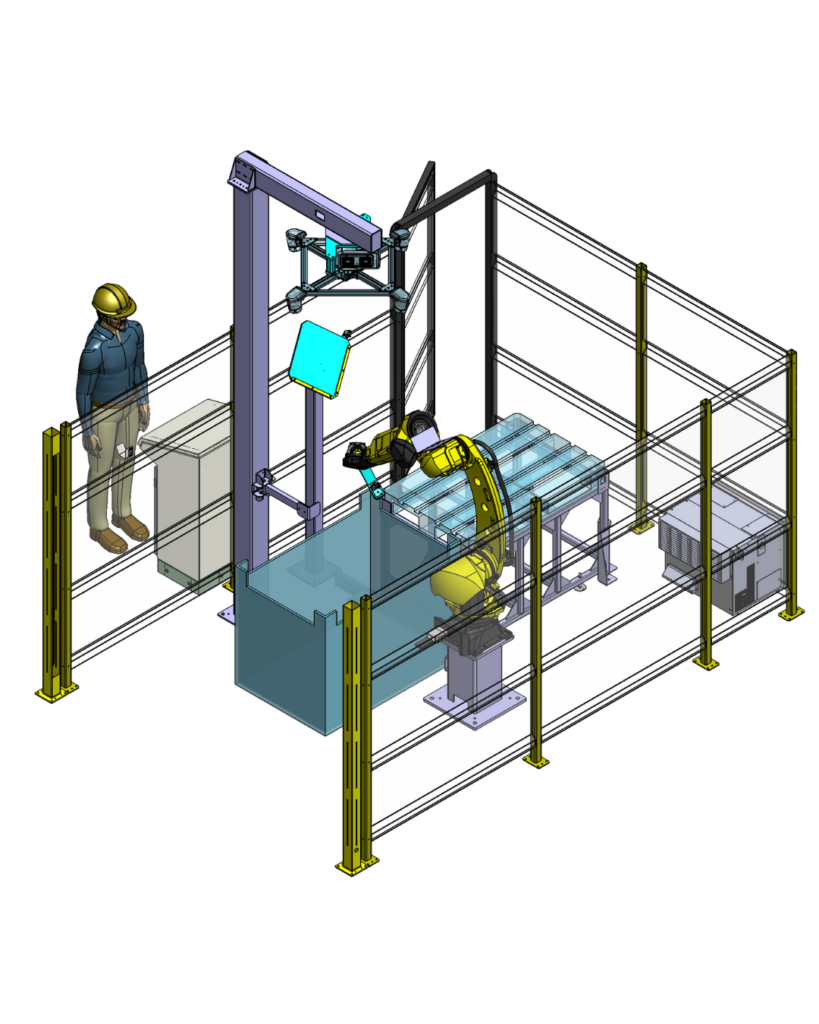
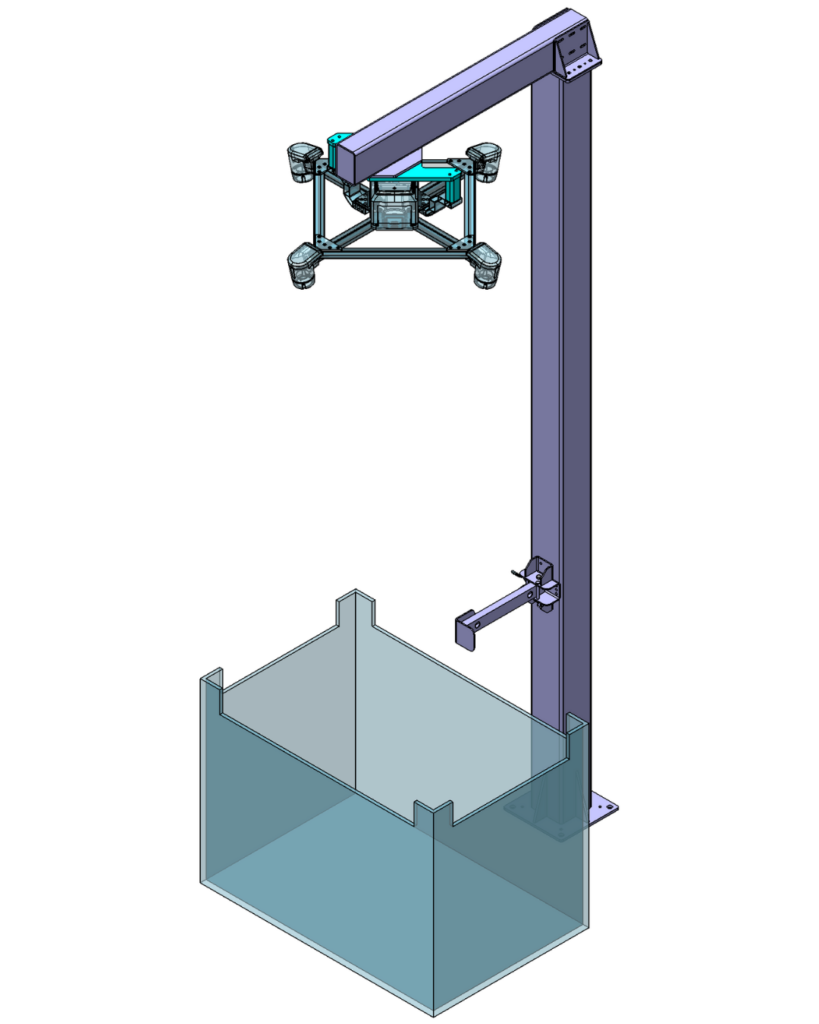
- Grande precisione del Robot nell’ingresso e nell’uscita dal cassone, grazie al software che suggerisce al robot tutti i percorsi da eseguire
- Possibilità di avere più cassoni con pezzi alla rinfusa, anche di tipologia diversa, con un solo sistema di visione 3D: il robot passerà automaticamente al cassone successivo quando il primo sarà stato svuotato, senza l’intervento dell’operatore
- Sensori a fascio che permettono di rilevare tutte le tipologie di cassoni che vengono trattati (legno, plastica, ferro, ecc.)
- Molteplici possibilità di utilizzo del pezzo prelevato: pallettizzazione, invio successivo alla fase di lavorazione e manipolazione
- Dimensioni compatte della cella
- Barriere fotoelettriche di sicurezza che portano all’interruzione del ciclo di lavorazione dal momento che rilevano una presenza umana

