Quando nacquero le prime soluzioni di Bin Picking ci si trovò di fronte ad un problema matematico e fisico tipico della robotica e della visione, che fu superato solamente con l’introduzione della visione 3D, associata ad un Robot antropomorfo.
Inizialmente la visione 3D avveniva tramite una scansione laser abbastanza rudimentale, con scorrimento su asse lineare del sistema di visione per la ricostruzione del dato. Negli ultimi 15 anni grazie al progresso tecnologico, quello che prima era considerato un problema matematico è diventata una tecnologia accessibile a tutti e pronta all’utilizzo.
Il Bin Picking nasce per risolvere una serie di problemi che i nostri clienti si trovano ad affrontare:
pallettizzazione dei pezzi da lavorare;
riduzione dello sforzo fisico dell’operatore nel carico/scarico della macchina utensile;
riduzione dei tempi di manipolazione.
Tre fattori principali che hanno contribuito
all'evoluzione di questa tecnologia
Sensori 3D
L’introduzione dei sensori 3D ha consentito, senza movimentare le parti, di avere una fotografia 3D molto precisa del volume acquisito. Questa tecnologia permette di ottenere prestazioni migliori sia in termini di velocità dell’operazione stessa che dal punto di vista della presa.
velocità di calcolo
La maggior velocità di calcolo dei computer a bordo macchina che prevedono tutte le traiettorie e i movimenti dei robot.
Evoluzione software
L’evoluzione dei software negli ultimi anni.
Cos’è il Bin Picking?
Negli ultimi quindici anni, nel settore dell’automazione industriale e dell’asservimento per macchine utensili CNC, si è assistito a un’evoluzione significativa: il Bin Picking.
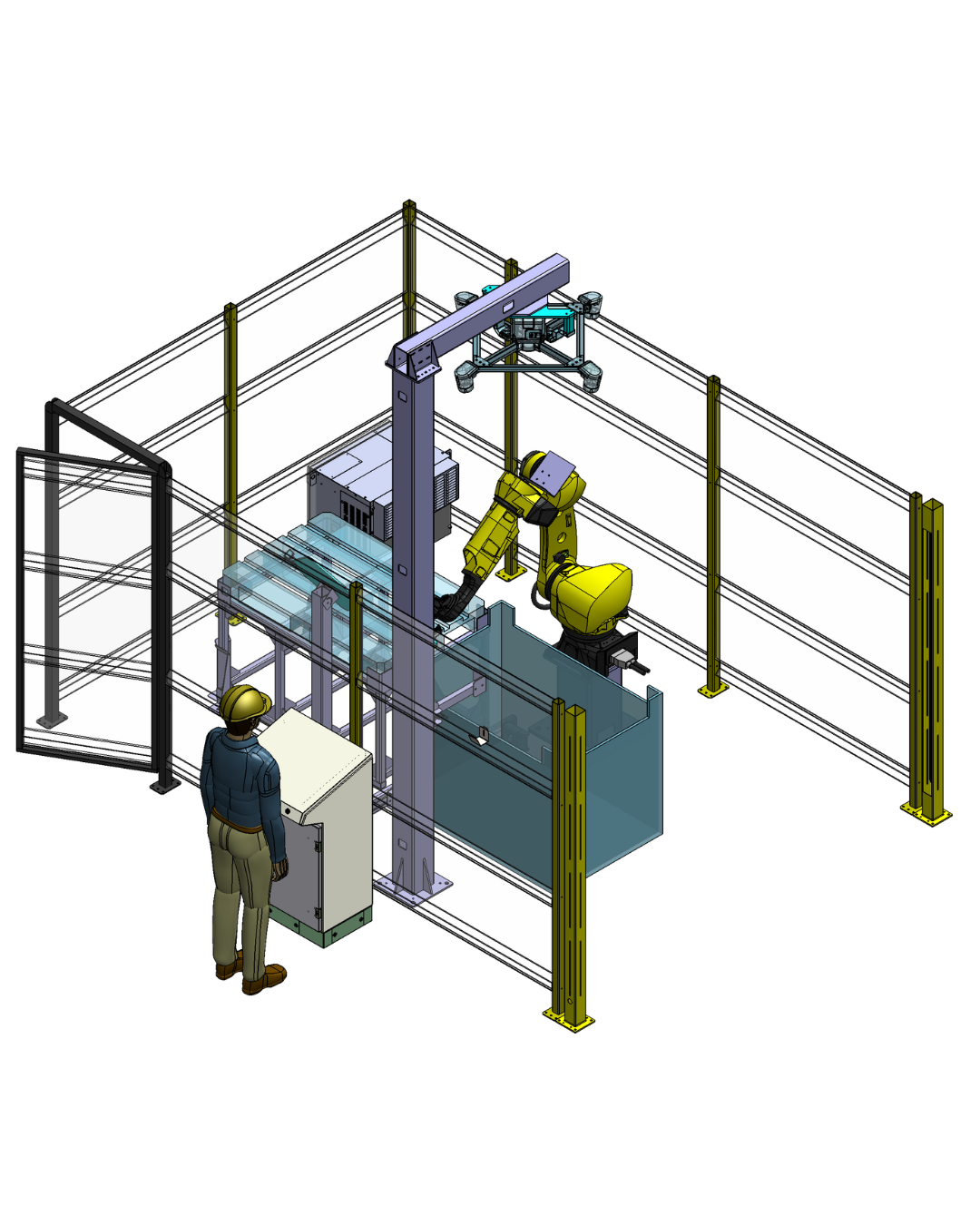
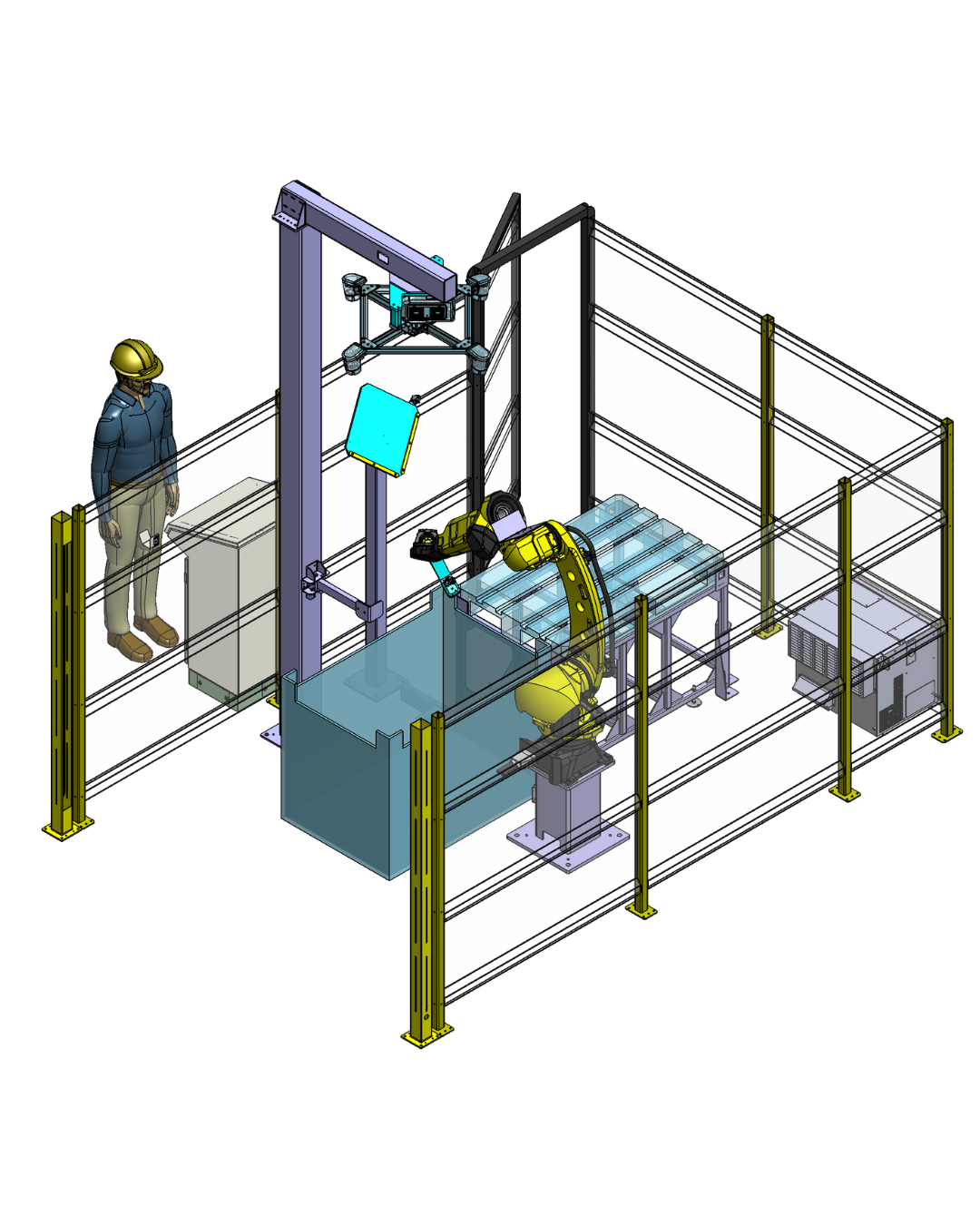
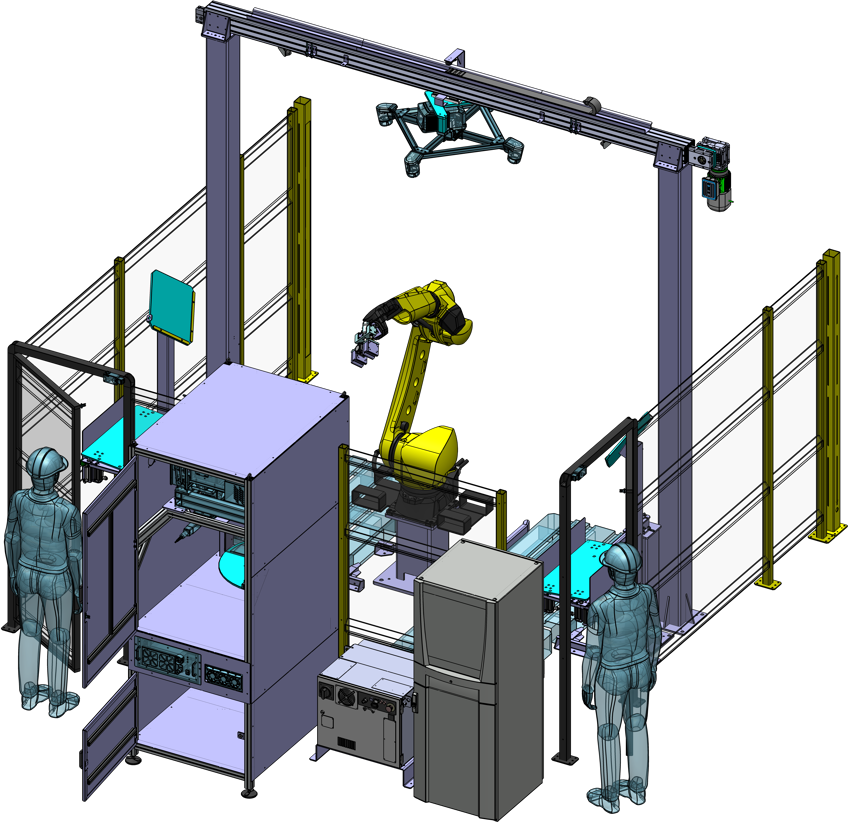
Il Bin Picking è un sistema di presa alla rinfusa dei pezzi da un cassone per trasferirli ad una stazione di stoccaggio, un deposito prescelto dal cliente, oppure destinarli a dei cicli di lavorazione.
VANTAGGI
Pallettizzazione più precisa
Tempi di lavoro ridotti
Riduzione dei costi della manodopera
Funzionamento costante e continuo senza interruzioni (ciclo non presidiato)
Grande precisione del Robot nell’ingresso e nell’uscita dal cassone, grazie al software che suggerisce al robot tutti i percorsi da eseguire
Possibilità di avere più cassoni con pezzi alla rinfusa, anche di tipologia diversa, con un solo sistema di visione 3D:
il robot passerà automaticamente al cassone successivo quando il primo sarà stato svuotato, senza l’intervento dell’operatore
Sensori a fascio che permettono di rilevare tutte le tipologie di cassoni che vengono trattati (legno, plastica, ferro, ecc.)
Molteplici possibilità di utilizzo del pezzo prelevato:
pallettizzazione, invio successivo alla fase di lavorazione e manipolazione
Dimensioni compatte della cella
Barriere fotoelettriche di sicurezza che portano all’interruzione del ciclo di lavorazione dal momento che rilevano una presenza umana
È possibile spiegare la complessità di questa tecnologia attraverso il rapporto delle dimensioni dell’oggetto da prelevare rispetto alla cassa che lo contiene.
Quando da una cassa piccola l’oggetto da prelevare è molto grande, si parla di un’applicazione semplice. Quando, al contrario, da una cassa molto grande, deve essere prelevato un oggetto piccolo, si parla di un’applicazione più complessa, poiché il grado di ripetibilità e di accuratezza deve essere più elevato.
Il nostro approccio
In base al tipo di prodotto e alle esigenze del cliente, viene svolta una verifica preliminare sulla fattibilità dell’applicazione. Questa prima analisi ci consente di fornire al cliente una serie di dati indispensabili alla formulazione della sua scelta: esito della fattibilità, tempi ciclo, percentuale di svuotamento del cassone, tipologia di robot e di sistemi di presa, layout della cella e tanti altri dati utili. Oltre ad una simulazione mirata alle specifiche richieste, è sempre possibile prendere visione di un’applicazione funzionante.
TESTIMONIANZA
“Ci aspettavamo una soluzione che rispettasse i target di tempo e precisione, ma ROBO FEED ha fatto di più: ha migliorato il tempo ciclo del 20% e raggiunto una percentuale di svuotamento superiore al 99%. Il tutto con un’interfaccia semplice da usare anche per i nostri operatori non esperti. È raro trovare un fornitore così allineato agli obiettivi e con una reale capacità di ascolto.”
G.S. – CEO
Osserva dal vivo
un caso operativo
Nel case history sviluppato per HT Srl, ROBO FEED ha realizzato una soluzione avanzata di Bin Picking per l’automazione del prelievo di lame grezze alla rinfusa destinate al settore delle macchine agricole.
L’applicazione è stata progettata per gestire un processo ad elevata complessità, caratterizzato dalla presenza di migliaia di pezzi disposti casualmente all’interno dei cassoni, garantendo elevata precisione, rapidità operativa e continuità produttiva.
Obiettivi raggiunti
Automazione completa del processo di prelievo di pezzi alla rinfusa
Efficienza di svuotamento del cassone fino al 99%
Tempo ciclo inferiore ai 12 secondi
Riduzione delle operazioni manuali e della dipendenza dall’operatore
Maggiore continuità produttiva e stabilità del processo